تنظیمات موقعیت سرو موتور
 هنگامی که یک سرو موتور در مد کنترلی موقعیت(Position Control) قرار می گیرد، با دو روش قابل کنترل است،
هنگامی که یک سرو موتور در مد کنترلی موقعیت(Position Control) قرار می گیرد، با دو روش قابل کنترل است،
کنترل دیجیتال با ارسال قطار پالس مربعی
کنترل انالوگ با ارسال ولتاژ خطی(۰-۱۰Volt)
به حالتی که سروو را از طریق ولتاژ کنترل می کنیم حالت کنترل ولتاژی یا V-Command می گویند و به حالتی که سرو موتور را با پالس کنترل می کنیم حالت کنترل پالسی یا P-Command می گویند.
در حالت کنترل ولتاژی سیستم سروو موتور، سیستم کنترلر موقعیت(برای مثال ۸۰۲Cزیمنس یا ماجول های Position Control انالوگ شرکت امرن) یک خروجی انالوگ (بصورت معمول -۱۰V ~ +10V )را به سرو ارسال کرده و برای فیدبک از از انکودر فیدبک سروو موتور استفاده می کند، شماتیک کنترلی سیستم V-Command بصورت تصویر زیر می باشد:
همانطور که در تصویر بالا مشاهده می شود این نکته مهم را باید در نظر داشت که سرو درایو باید در مد سرعت(Speed mode) یا گشتاور (Torque Mode)تنظیم شده باشد تا بتوان با ان عملیات کنترل موقعیت را انجام داد. بصورت معمول تمامی سروو هایی که مد کنترلی سرعت یا گشتاور را داشته باشند، قابلیت کنترل P-Command را دارند.
در حالت کنترل دیجیتال یا کنترل پالسی یک قطار پالس مربعی به سروو درایو ارسال می گردد و نیازی به گرفتن فیدبک نیست و دریافت فیدبک از سرو درایو می تواند بصورت اختیاری باشد. این قطار پالس مربعی که از طریق کنترلر موقعیت به سرو درایوارسال می گردد را از دو دید مختلف بررسی می کنیم:
طبقه بندی سخت افزاری: میزان سطح ولتاژ
طبقه بندی نرم افزاری: فرمت ارسال پالس به سرو درایو
طبقه بندی سخت افزاری:
سطح ولتاژ خروجی کنترلر ۵ ولت(Line Driver)
سطح ولتاژ خروجی کنترلر ۲۴ ولت(Open-collector)
سطح ولتاژ خروجی کنترلر ۵ ولت
سطح ولتاژ ورودی پالس در سروو درایو ۵ولت می باشد ولی سطح ولتاژ خروجی کنترلرموقعیت ۵ولت یا ۲۴ولت می باشد، هنگامی که سطح ولتاژ خروجی کنترلر ۵ولت باشد، این خروجی بصورت مستقیم به ورودی پالس سروو درایو متصل می گردد و به این حالت Line Driver می گویند،نحوه اتصال خروجی کنترلر به ورودی سرو درایو مشابه تصویر زیر می باشد. نمونه هایی از این نحوه سیم کشی سخت افزاری مانند اتصال خروجی کارت Motion Card سری ADT-8840 یا کارت ADT-8948 شرکت ADTECH.
سطح ولتاژ خروجی کنترلر ۲۴ ولت
در حالتی که خروجی کنترلر بصورت ترانزیستوری با سطح ولتاژ ۲۴ولت باشد(برای مثال PLC سری DVP-28SV11T دلتا یا PLC سری ۶۰MCT فاتک یا PLC سری S7200-CPU226XP زیمنس) در این حالت برای تبدیل سطح ولتاژ ۲۴ولت(در کنترلر) به سطح ولتاژ ۵ولت(در سرو درایو) یک مقاومت(بین ۱K-ohm تا ۲٫۲K-ohm بسته به شرکت سازنده و مشخصات سرو درایو) را در مسیر خروجی از کنترلر به سرو درایو سری می کنند، در برخی از سرو های موجود در بازار برای تسهیل در اتصالات سیم بندی فرمان سرو درایو، شرکت سازنده این مقاومت(مقاومت کاهش ولتاژ) را بصورت داخلی در سرو درایو تعبیه می کنند(مانند سروو درایو های سری ASDA-A2 یا ASDA-B2 دلتا( نحوه اتصال کنترلر به سرو درایو در تصویر زیر مشاهده می شود:
بصورت نرمال در حالت Line driver فرکانس بالاتری نسبت به حالت Open Collector داریم و ایزوله بودن سیستم line driver یکی از بزرگترین مزایای آن می باشد.
طبقه بندی نرم افزاری:
در طبقه بندی نرم افزاری برای کنترل موقعیت دیجیتال یک سروو درایو، ۳حالت مختلف پالس خروجی بصورت زیر می باشد:
یک پالس/یک ورودی(PULSE/DIR)
یک پالس/دو ورودی(CW/CCW)
دوپالس/دو ووردی(A/B Phase)
معمولا بیشتر سرو درایو های استاندارد موجود در بازار هر سه حالت را پشتیبانی می کنند، همچنین در کنترلر های موقعیت هم این قابلیت بصورت نرم افزاری قابل تنظیم است، نکته ی مهم این است که باید در کنترلر کننده و در سرو درایو هر دو روی یک حالت تنظیم شده باشند،
یک پالس یک ورودی(یا PULSE/DIR) :
در این حالت یک خروجی کنترلر از نوع پالس می باشد و یک خروجی دیگر که به نام Dir (کوته شده عبارت Direction) می باشد برای تنظیم جهت سرو موتور استفاده می شود، برای مثال هنگانی که سرو موتور راستگرد حرکت می کند ورودی Dir ان باید ۰ و هنگامی که چپگرد کار می کند ورودی Dir ان ۱ شده باشد
یک پالس دو ورودی(CW/CCW)
در این حالت دو ورودی پالس به سرو درایواعمال می شود، در صورتی که به ورودی PULSE پالس اعمال کنیم، سروو بصورت راستگرد حرکت می کند و چنانچه به ورودی Dir پالس اعمال کنیم سرو موتو بصورت چپگرد کار می کند، نکته مهم این که در هر لحظه به یکی از ورودی های سرو درایو پالس اعمال می شود.
دوپالس/دو ووردی(A/B Phase)
در این حالت همواره و بطور همزمان به ورودی های PULSE و DIR پالس هایی با اختلاف فاز ۹۰ درجه اعمال می کنیم، (یک نمونه ی خوب مولد پالس A/B Phase انکودر های نوری می باشد) چنانچه تقدم با فاز A باشد سروو راستگرد و چنانچه تقدم با فاز B باشد سرو موتور چپگرد حرکت خواهد کرد.
هرکدام از این حالت های نرم افزاری فوق، مزایا و معایب خاص خود را دارند و بسته به نوع کنترلر استفاده شده، در کاربرد های مختلف متفاوت است.
آموزش سروو دلتا کار با کی پد
کلید charge led : LED روشن نشان دهنده اتصال برق به سروو درایو یا شارژ باقیمانده در قطعات داخلی قدرت درایو می باشد . به هیچ یک از ارتباط های الکتریکی در هنگامی که LED روشن است ، دست نزنید .
کلید LED Display : نمایشگر ۵ رقمی LED سون سگمنت : وضعیت سروو، تنظیمات پارامترها یا آلارم ها را نمایش می دهد .
کلید Mode Key: جهت انتخاب و تغییر حالت ها از جمله رفتن به مد پارامترها برای تغییر پارامترها استفاده می شود
کلید Shift Key : برای تغییر در گروه پارامترها وبرای جابجایی مکان نما به سمت چپ
کلید Up Key : برای اضافه کردن مقادیر بر روی نمایشگر از این کلید استفاده می شود
کلید Down Key: برای کم کردن مقادیر بر روی نمایشگر از این کلید استفاده می شود.
کلید Set Key : بعد از تنظیمات برای ذخیره اطلاعات و مقادیر از این کلید استفاده می شود.
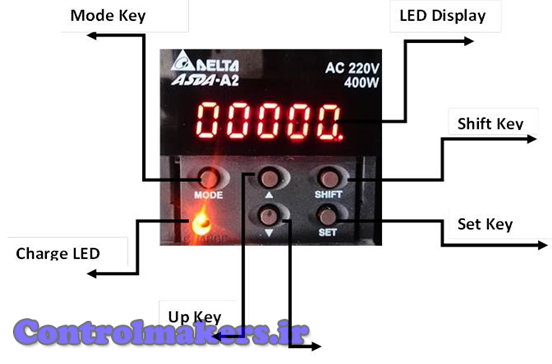
کی پد سروو دلتا asda-a2 delta