موتور DC بدون جاروبک
طرحی سه بعدی از موتور DC بدون جاروبک
ساختمان و عملکرد موتور بدون جاروبک (BLDC Motor)
ساختار موتورهای DC بدون جاروبک
موتورهای BLDC اصطلاحا ( Brushless DC Motor ) نوعی از موتورهای سنکرون هستند. این موضوع به این معنی است که میدان مغناطیسی در روتور و استاتور با یک فرکانس ایجاد می شوند. انواع الکتروموتور DC بدون جاروبک دارای لغزش به آن مفهومی که در موتورهای القایی وجود دارد نمی باشند.
موتورهای دیسی براشلس با منبع دیسی تغذیه میشوند که توسط اینورتر مجتمع برای به حرکت درآوردن موتور به سیگنال الکتریکی AC تبدیل میشود. سنسورها و قطعات الکترونیکی دیگری نیز خروجی اینورتر را کنترل مینمایند. موتورهای براشلس همچنین به صورت موتورهای پلهای وصف میشوند، هرچند عنوان موتور پلهای برای آن دسته از موتورها به کار میرود که طراحی آن ها به گونهای است که به حالتهایی عمل نمایند که روتور آن به سرعت در نقطه زاویهای تعریفشده بایستد.
موتورهای BLDC در انواع تکفاز، دو فاز و سه فاز وجود دارند. مطابق نوع آن، استاتور دارای همان تعداد سیم پیچ می باشد. علاوه بر این موتورهای سه فاز بیشترین رواج و مصرف را در بین انواع دیگر دارند. که در اینجا به نوع سه فاز می پردازیم.
موتور دیسی براشلس
استاتور موتور براشلس
استاتور موتور DC بدون جاروبک از ورقه های فولادی به هم پرچ شده با سیم پیچی که در شیارهای آن قرار گرفته به صورت شکل زیر ساخته شده است. استاتور همانند استاتور یک موتور القایی است. اما سیم پیچ ها به روشی متفاوت در استاتور توزیع شده اند. بیشتر موتورهای BLDC دارای سه سیم پیچ در استاتور با اتصال ستاره هستند. هر کدام از این سیم پیچی ها در محیط استاتور توزیع شده اند. و تعداد زوجی از قطب ها را تشکیل داده اند.
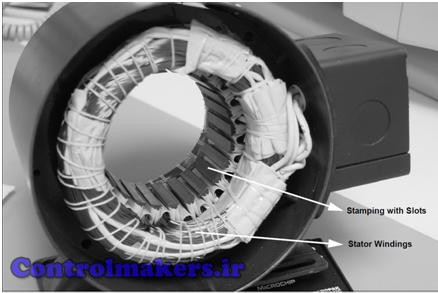
استاتور موتور DC بدون جاروبک
دو نوع مختلف از سیم پیچی استاتور وجود دارد
این تفکیک بر اساس اتصالات داخلی پیچک های یک سیم پیچ که انواع مختلفی از نیروی ضد محرکه ( EMF ) را ایجاد می کنند شکل گرفته است.
۱- موتورهای ذوزنقه ای ; موتور ذوزنقه ای نیروی ضد محرکه مغناطیسی را به فرم ذوزنقه ایجاد می کند مانند شکل زیر .
نیروی ضد محرکه مغناطیسی ذوزنقه ای موتور BLDC
۲- موتورهای سینوسی ; در موتور سینوسی نیروی ضد محرکه مغناطیسی سینوسی مانند شکل زیر .
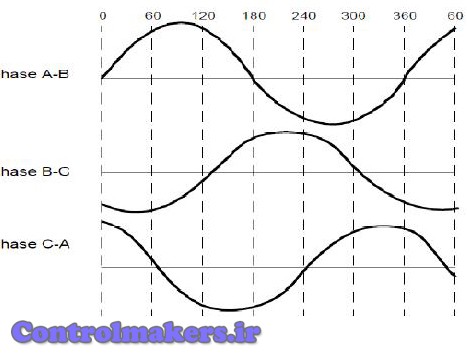
نیروی ضد محرکه مغناطیسی سینوسی موتور BLDC
همان طور که در شکل های زیر نشان داده شده است . علاوه بر نیروی ضد محرکه مغناطیسی جریان فازها نیز بسته به نوع موتور ذوزنقه ای یا سینوسی می باشد. گشتاور ایجاد شده با موتور سینوسی هموارتر از موتور ذوزنقه ای است. البته این موضوع با هزینه و قیمت بیشتر بدست می آید. با توجه به اینکه در موتور سینوسی به علت توزیع شده بودن سیم پیچ ها اتصالات بین پیچک های آن بیشتر است از این رو فضا و مقدار سیم مسی بیشتری مصرف می شود.
روتور موتور دیسی براشلس
روتور از مغناطیس دائم ساخته شده است و از دو تا هشت قطب، متغیر است که این قطب ها یک در میان قطب های شمال و جنوب هستند. بر مبنای چگالی شار مورد نیاز در روتور، ماده مغناطیسی مناسب برای ساخت روتور استفاده می شود. مغناطیس های فریت در گذشته برای ساخت مغناطیس دائم استفاده می شده است. با پیشرفت تکنولوژی، مغناطیس های آلیاژی کمیاب مقبولیت یافته اند. مغناطیس های فریت ارزانتر هستند اما اشکال آن ها این است که در یک اندازه ثابت دارای چگالی شار کمتری هستند. در مقابل، مواد آلیاژی چگالی مغناطیس بالاتری دارند و این امکان را می دهند که برای ایجاد گشتاوری یکسان، روتور کوچکتری ساخته شود. همچنین، این آلیاژهای مغناطیسی نسبت اندازه به وزن را بهبود داده و در مقایسه با موتوری هم اندازه که با ماده مغناطیسی فریت ساخته شده است گشتاور بالاتری را ایجاد می کنند.

روتور یک موتور براش لس ( موتور فن کامپیوتر خانگی )
تحقیقات دائمی درباره بهبود چگالی شار جهت فشردگی بیشتر روتور در جریان است، اسامی تعدادی از این موارد برای آلیاژهای مغناطیسی کمیاب در زیر آورده شده است
۱- نئودیمیوم( Nd) ۲- ساماریوم کوبالت(SmCo) ۳- فریت و برن(NdFeB) ۴- آلیاژنئودیمیوم
شکل زیر مقطع عرضی ترکیب های متفاوت مغناطیس در روتور را نشان می دهد.
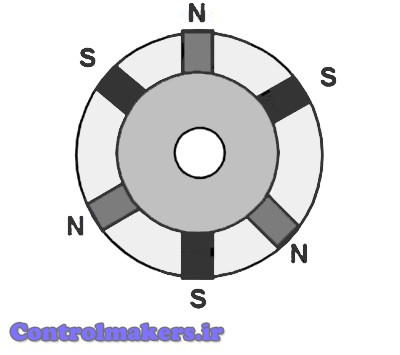
مقطع عرضی مغناطیس روتور موتور براش لس – پیچه های مغناطیسی به صورت عمود بر مرکز روتور در هسته روتور قرار داده شده اند .
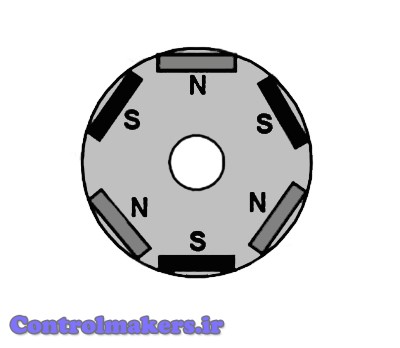
مقطع عرضی مغناطیس روتور موتور براش لس – پیجه های مغناطیسی به صورت عمود بر مرکز روتور بر روی جداره داخلی تعبیه شده اند
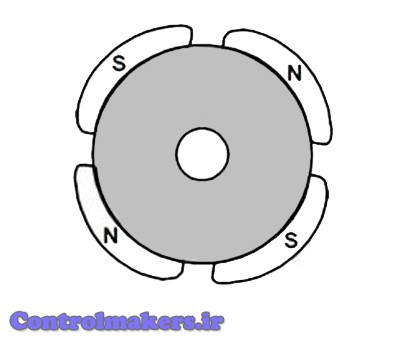
مقطع عرضی مغناطیس روتور موتور براش لس –
پیچه های مغناطیسی در جداره بیرونی روتور تعبیه شده اند
سنسورهای اثر هال
بر خلاف موتورهای DC معمولی کموتاسیون موتور DC بدون جاروبک به صورت الکترونیکی کنترل می شود. برای گردش یک موتور BLDC استاتور این موتور بایستی با یک توالی خاص تحریک شود. دانستن موقعیت روتور به منظور اینکه تشخیص دهیم کدام یک از سیم پیچ ها باید در توالی بعدی تحریک شود بسیار مهم است. موقعیت روتور به وسیله سنسورهای اثر هال قرار گرفته در استاتور تعیین می شود. بیشتر موتورهای BLDC دارای سه عدد سنسور قرارگرفته در استاتور می باشند. هنگامی که پل های مغناطیسی روتور از نزدیک سنسورهای هال می گذرند آن ها یک سیگنال بالا یا پایین وضعیت را اعلام می نمایند. که نشانگر عبور قطب N یا S از کنار سنسورها است. بر اساس ترکیب سیگنال های این سه سنسور هال توالی صحیح کموتاسیون تعیین می شود.
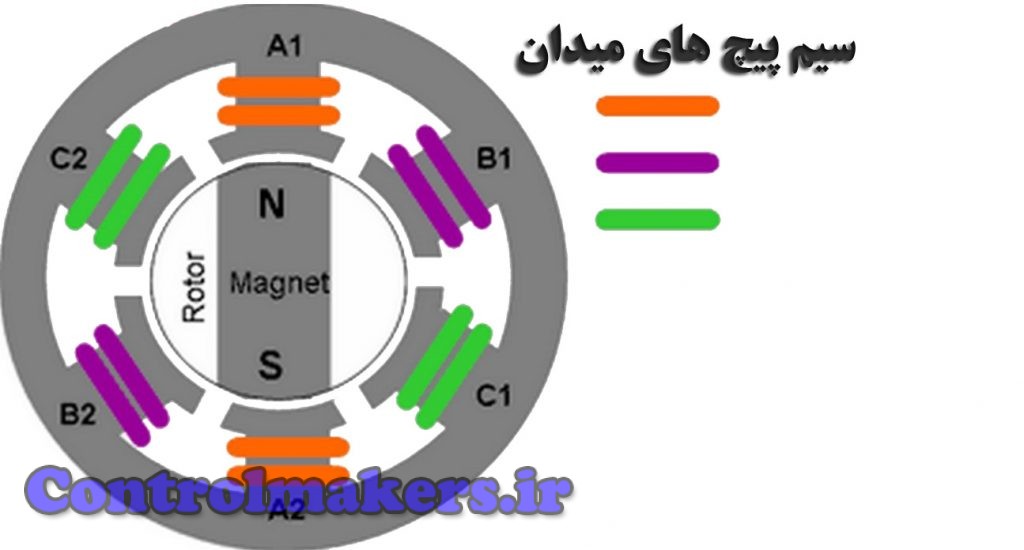
شکل زیر مقطع عرضی یک موتور BLDC با قطب های متناوب N و S را نشان می دهد. تعبیه سنسورهای هال در استاتور یک پروسه پیچیده است زیرا نامیزان بودن این سنسورهای هال نسبت به مغناطیس های روتور باعث ایجاد خطا در تشخیص صحیح موقعیت روتور می شود. برای ساده سازی فرآیند نصب سنسورهای هال در استاتور، برخی از موتورها ممکن است مگنت های سنسور هال بر روی روتور را علاوه بر مگنت های اصلی داشته باشند. این ها نسخه المثنی کوچک شده ای از روتور هستند. از اینرو، هنگامی که روتور گردش می نماید ، مگنت های سنسور هال همان اثری را ایجاد میکنند که مگنت های اصلی ایجاد می نمایند. سنسورهای هال معمولا بر روی یک برد PC نصب شده اند. و بر روی کلاهک محفظه انتهایی غیر گردان ثابت شده اند. این موضوع کاربر را قادر می سازد برای بدست آوردن بهترین عملکرد کل مونتاژ آن ها را تنظیم نماید.
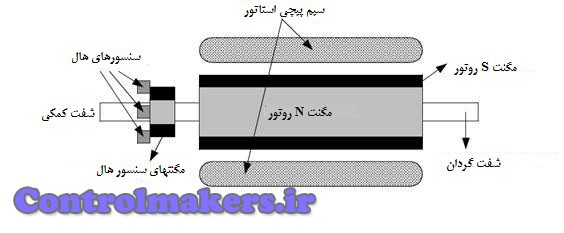
مقطع عرضی موتور DC بدون جاروبک با قطب های متناوب N و S
تئوری عملکرد
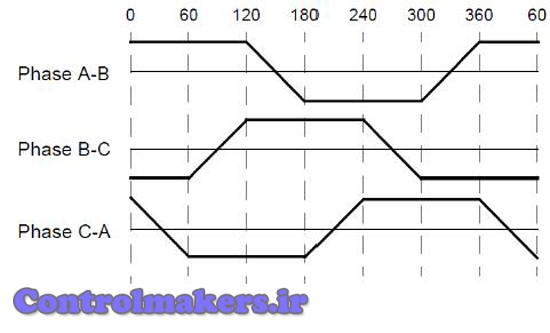
هر توالی کموتاسیون یکی از سیم پیچ ها را به صورت مثبت تحریک کرده ( جریان به سیم پیچ وارد می شود) دیگری را منفی تحریک کرده (جریان از سیم پیچ خارج می گردد) و سومی را تحریک نمی نماید. گشتاور از برهمکنش میدان مغناطیسی تولید شده توسط پیچک های استاتور و مغناطیس دائمی روتور ایجاد می گردد. در حالت ایده آل گشتاور حداکثر در هنگامی که این دو میدان در زاویه ۹۰ درجه نسبت به یکدیگر قرار دارند رخ می دهد و با کم شدن این زاویه گشتاور نیز کاهش می یابد. به منظور اینکه موتور به کار خود ادامه دهد میدان مغناطیسی تولید شده توسط سیم پیچ ها بایستی به نسبت حرکت روتور تغییر موقعیت دهند تا همدیگر را بگیرند. این مساله همان چیزی است که تحت عنوان کموتاسیون ۶ مرحله ای که چگونگی تحریک سیم پیچ ها را تعیین می نماید شناخته می شود.

انیمیشنی از نحوه عملکرد موتور بدون جاروبک
مزایا و معایب استفاده از موتورهای BLDC
اولین چالشی که در انتخاب موتورهای الکتریکی وجود دارد چرایی این انتخاب، مزایا ، معایب و سر به سر کردن این موارد و در نهایت تحلیل اینکه کدام یک از گزینه ها برای یک کاربرد خاص مفیدتر و به صرفه تر است، می باشد. از اینرو در اینجا این تحلیل برای موتورهای BLDC ارائه می گردد تا دید روشنتری نسبت به این موضوع بدست بیاوریم. این مساله در دو جدول مزایا و معایب این موتورها طبقه بندی و تحلیل شده است. جدول زیر مزیت های موتور BLDC و دلایل وجود این مزیت ها را معرفی می نماید .

مزیت های موتور BLDC
معایب
اولین اشکال موتورهای BLDC قیمت آن ها است. البته این مساله به دلیل ذات ساختاری خود موتور نبوده است زیرا موتور BLDC در حقیقت ساده تر از موتور DC با جاروبک است. این قیمت بیشتر برای موتورهای BLDC در اغلب مواقع به علت نیاز به درایو الکترونیکی برای این موتورها می باشد. برای کاربردهای تک سرعت، احتمال دارد این هزینه افزایش قیمت با وجود مزیت های دیگر این موتور توجیه پذیر نباشد. در حالی که اگر نیاز به سرعت متغیر و یا کنترل موقعیت داشته باشیم که در هر صورت نیازمند مدارات الکترونیک هستیم آن گاه موتورهای BLDC علاوه بر اینکه مزیت های فوق را دارند چندان هم گران محسوب نمی شوند. موارد متعدد استفاده از دیسک درایو تا ماشین های ابزار همه به تکنولوژی BLDC تغییر یافته اند.
موتور DC بدون جاروبک