موتورهای DC
ساختمان و نحوه کار موتور DC
ساختمان موتورهای DC
ماشینهای DC از سه قسمت عمده به صورت زیر تشکیل شده اند.
۱- استاتور
۲- روتور
۳ جاروبک و نگهدارنده
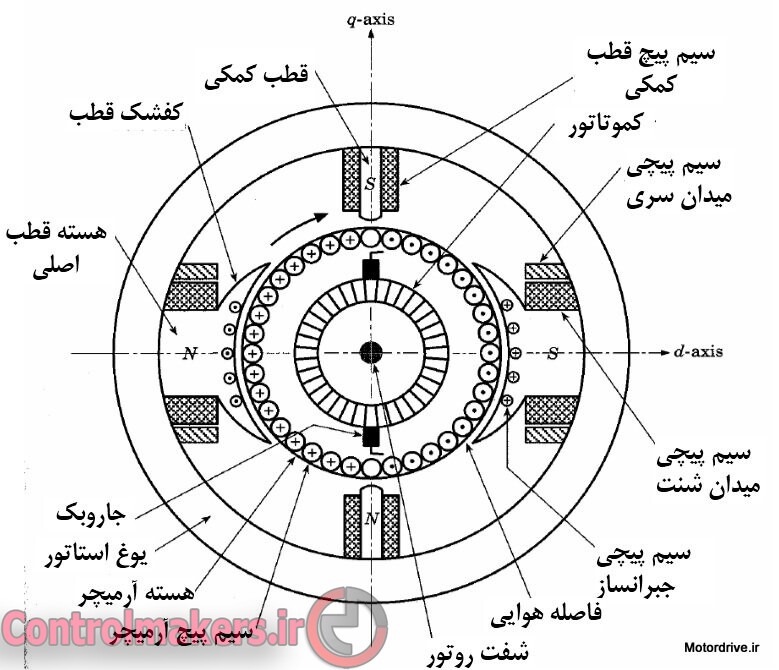
۱- استاتور موتور DC
سیم پیچ میدان به دو سیم پیچ سری و شنت تقسیم می گردد هسته آهنی و فریم موتور اجزای اصلی استاتور هستند در موتورهای بزرگتر قطب کمکی و سیم پیچی جبرانگر نیز به این اجزا افزوده می گردد.

۲- روتور موتور DC
روتور موتور DC که به عنوان آرمیچر نیز شناخته می شود در شکل مقابل آورده شده است. اجزای اصلی روتور هسته سیم پیچی و یاتاقان ها هستند. روتور قسمت گردان ماشین DC است. 
۳- مکانیزم های جاروبک و نگهدارنده جاروبک
جاروبک وظیفه انتقال جریان به کلکتور گردان را بر عهده دارد. جاروبک و کلکتور عامل یکسو کردن گشتاور در موتورهای الکتریکی DC هستند.

اصول کار یک موتور DC عبور جریان در یک هادی، در اطراف آن میدان مغناطیسی ایجاد می کند. این موضوع در شکل (A) نشان داده شده است. هنگامی که هادی حامل جریان در یک میدان مغناطیسی خارجی قرار می گیرد. میدان خارجی بر هادی حامل جریان نیرویی وارد می کند که این موضوع در شکل (B) نشان داده شده است.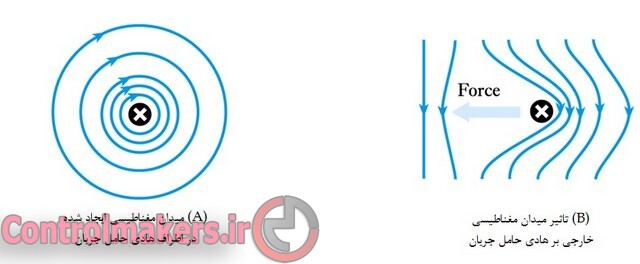 با بررسی اشکال بالا می توان موارد زیر را استنتاج کرد.
با بررسی اشکال بالا می توان موارد زیر را استنتاج کرد.
- اگر یک هادی داخل میدان مغناطیسی قرار داده شود
– حرکت هادی درون میدان جریان الکتریکی تولید می کند (ژنراتور) – عبور جریان الکتریکی درون هادی تولید نیروی محرک میکند ( موتور)
- بیان معکوس قضیه فوق به این صورت است که: یک موتور DC می تواند به عنوان ژنراتور مورد استفاده قرار گیرد.
– گرچه ماشینی که به منظور موتور بودن طراحی شده است برای کارکرد موتوری بهینه تر می باشد.
نحوه عملکردبه این صورت است که ولتاژ DC اعمال شده به موتور از طریق برس کربن که روی کموتاتور سوار شده است به سیم پیچ های آرمیچر اعمال می شود که این کار باعث تبدیل شدن سیم پیچ های آرمیچر به آهنربا می شود . ( سیم پیچ های آرمیچر به به کموتاتور متصل هستند ) البته در موتور های جریان مستقیم کوچک از آهنربای دائمی برای استاتور استفاده می شود . که معمولا در دستگاه های الکتریکی کوچک از این روش استفاده می شود مانند درایوهای سی دی ، اسباب بازی ها ، فن های لب تاپ و … . ولی در موتورهای بزرگتر در کاربردهای صنعتی استاتور همچنان یک آهنربای الکتریکی است . معمولاً از آن در کاربردهای ترکشن (کششی) نظیر لکوموتیوها استفاده میکنند.
موتور جریان مستقیم یا DC
در موتورهای جریان مستقیم کلاسیک از آهنربای الکتریکی استفاده می شود . جهت جریان الکتریکی باید در هر سیکل یا گردش برای ایجاد نیروی جاذبه و دافعه بین آهنربای دائمی و آهنربای الکتریکی دو بار عوض شود که این کار توسط یک سویچ گردشی به نام کموتاتور انجام می شود . با اتصال ولتاژ به سیم پیچ های استاتور ، سیم پیچ ها تبدیل به آهنربای استاتیک یا ثابت با قطب شمال و جنوب می شود ،
پارامترهای موثر بر سرعت موتور الکتریکی DC
۱- ولتاژ ۲- جریان ۳- بار اعمال شده به شافت موتور یا گشتاور ترمزی
با تغییر جریان میدان (سیم پیچی روی آهنربای الکتریکی) میتوانیم نسبت سرعت/گشتاور موتور را تغییر دهیم. اگر سیم پیچی میدان به صورت سری با سیم پیچی آرمیچر قرار داده شود، یک موتور گشتاور بالای کم سرعت و اگر به صورت موازی قرار داده شود، یک موتور سرعت بالا با گشتاور کم خواهیم داشت. میتوانیم برای بدست آوردن حتی سرعت بیشتر اما با گشتاور به همان میزان کمتر ، جریان میدان را کمتر هم کنیم. این تکنیک برای ترکشن الکتریکی و بسیاری از کاربردهای مشابه آن ایدهآل است و کاربرد این تکنیک میتواند منجر به حذف تجهیزات یک جعبه دنده متغیر مکانیکی شود.
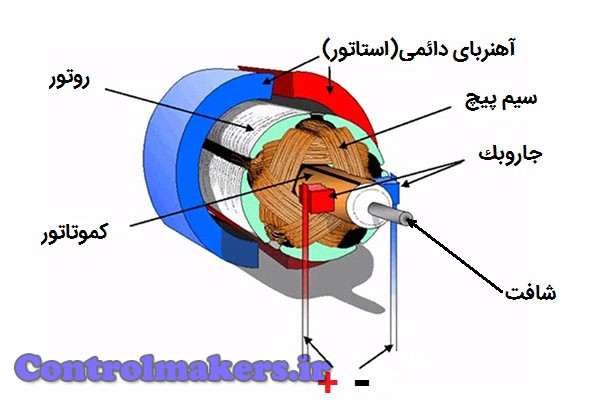
ساختمان داخلی موتور DC با آهنربای دائمی
انواع موتورهای الکتریکی DC
راه اندازی موتورهای DC:
در هنگام راه اندازی موتور های جریان مستقیم به دلیل صفر بودن نیروی ضد محرکه Ea جریان زیادی وارد موتور می شود.که این جریان زیاد می تواند مشکلات زیر را به جود آورد:
۱- ایجاد جرقهٔ زیانآور هنگام کموتاسیون
۲- آسیبدیدن سیمپیچ آرمیچر و از بین رفتن عایق بر اثر گرمای بیش از اندازه
۳- گشتاور راهاندازی بالا و شتاب سریع که به قسمتهای متحرک ماشین آسیب میرساند.
۴- افت زیاد ولتاژ تغذیه
بنابراین برای راهاندازی مناسب ماشین لازم است که جریان راهاندازی محدود شود، که این کار با قرار دادن مقاومت خروجی بر سر مدار آرمیچر انجام میشود. البته این مقاومت باید به تدریج از سر راه مدار برداشته شود، زیرا در هنگام کار عادی ماشین باعث کاهش سرعت کار ماشین و تلفات سلفی انرژی و در نتیجه کاهش بازدهی ماشین میشود.
درایو موتور DC
در یک موتور DC میدان مغناطیسی توسط جریان از طریق سیمپیچ میدان ایجاد میشود که این میدان همیشه در زاویه راست میدان ایجادشده با سیم پیچ آرمیچر قرار دارد. این موقعیت که جهتگیری میدان نام دارد، برای ایجاد حداکثر گشتاور موردنیاز است.
مجموعه کموتاتور – براش، حفظ این شرایط را صرفنظر از موقعیت رو تور تضمین میکند. زمانی که جهتگیری میدان حاصل شد، گشتاور موتور DC بهآسانی با جریان متفاوت آرمیچر و ثابت نگهداشتن جریان مغناطیسی کنترل میشود.
توسط درایوهای DC گشتاور و سرعت مستقیماً از طریق جریان آرمیچر کنترل میشوند: یعنی گشتاور در حلقه کنترل درونی و سرعت در حلقه کنترل بیرونی قرار دارد.
انواع درایوهای موتور DC
- کنترل کننده موتور های براش DC (با جاروبک): این کنترلکنندهها مختص موتورهای DC، موتورهای DC گیربکسدار و بیشتر موتورها یا عملگرهای خطی است.
- کنترل کننده موتور های بدون جاروبک DC (موتورهای براشلس): موتور های بدون جاروبک DC از این کنترل کنندهها استفاده می کنند.
- کنترل کننده موتوره ای Servo: که مورد استفاده سروو موتورها است.
- کنترل کننده موتور های پله ای: موتور های تک قطبی یا دوقطبی پله ای بسته به نوع آن ها از این استفاده می کنند.
مزایای موتورهای DC :
- دقت قابل قبول در کنترل سرعت
- گشتاور یکنواخت
- کنترل و راه اندازی آسان
- تامین مناسب گشتاور در سرعت های پایین
- امکان کنترل مستقل دور از گشتاور
معایب موتورهای DC :
- استهلاک بالا و هزینه تعمیر و نگهداری بالا
- قیمت نسبتا بالا
- نیاز به جریان DC برای راه اندازی
- پاسخ سرعت نه چندان مناسب
- راندمان نسبتا پایین