موتور DC با تحریک شنت – موازی
موتور خود تحریک شنت
موتور DC با تحریک شنت دارای دو بخش اصلی به شرح زیر می باشد .
- ۱- استاتور:به قسمت ثابت موتور استاتور (Stator) گفته می شود .
- ۲- روتور: به بخش متحرک ( با حرکت دوار ) موتور روتور یا آرمیچر گفته می شود.
روتور و استاتور نیز هر کدام شامل قسمت سیم پیچی شده و هسته می باشند. در هر دو بخش، هسته وظیفه تمرکز و هدایت میدان را دارد و معمولا از آهن تراس که نفوذپذیری مغناطیسی بالایی دارد ساخته می شود.
اجزاء مختلف موتور DC
استاتور
استاتور قطعه ثابت موتور های DC می باشد. با عبور جریان از داخل سیم پیچی آن، میدان مغناطیسی در جهت ثابت تولید می شود. این میدان در تقابل با میدان مغناطیسی تولیدی روتور، موجب تبدیل انرژی الکتریکی به مکانیکی می شود.
این قسمت شامل دو بخش اصلی زیر است:
۱- هسته: تمرکز شار و جلوگیری از هدر رفت میدان مغناطیسی.
۲- سیم پیچ: با اتصال به منبع تغذیه، میدان مغناطیسی تولید می کند.
روتور
روتور قطعه متحرک موتور های DC می باشد. این قطعه با ایجاد میدان مغناطیسی در جهت خاصی نسبت به استاتور باعث بوجود آمدن یک نیرو دورانی در روتور شده و همین امر باعث چرخیدن روتور یا همان آرمیچر می شود. بنابراین وظایف روتور عبارتند از:
۱- ایجاد میدان
۲- تبدیل انرژی الکتریکی به انرژی مکانیکی و چرخیدن
روتور شامل سه قسمت اصلی است:
۱- بوبین یا مولد میدان مغناطسی : ایجاد میدان مغناطیسی
۲- کموتاتور : ایجاد جریان الکتریکی در سیم پیچ های روتور به نحوی که بهترین گشتاور ایجاد شود.
۳- هسته: وظیفه متمرکز کردن شارهای مغناطیسی تولیدی
اساس کار موتور DC
سیم پیچ استاتور موتور های DC توسط یک منبع خارجی تغذیه می شوند. در نتیجه در آن جریان جاری شده و یک میدان یکنواختی را زیر قطب ها به وجود می آورد(منظور قطب محلی از استاتور است که سیم پیچ دور آن پیچیده شده است). حال اگر آرمیچر نیز توسط منبع خارجی و یا جریان خود استاتور تغذیه شود یک میدان مغناطیسی در آرمیچر نیز پدید خواهد آمد. از برهم کنش میدان های استاتور و آرمیچر، چرخش حاصل می شود که نتیجه آن تبدیل انرژی الکتریکی به مکانیکی خواهد بود.
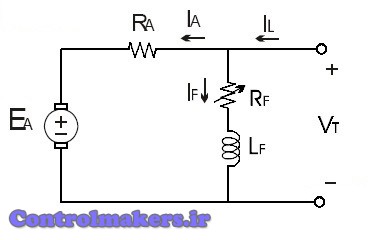
مدار معادل الکتریکی موتور DC شنت
طرز کار موتور DC باتحریک شنت
در موتور DC با تحریک شنت یا به طور خلاصه موتور DC شنت، مدار تحریک ( سیم پیچ استاتور) با مدار آرمیچر (سیم پیچ روتور) به صورت موازی ارتباط پیدا می کند (از این رو این موتور را شنت نام گذاری می کنند). به طور کلی این نوع موتور نیازی به دو منبع تغذیه برای سیم پیچ های میدان و آرمیچر ندارد و تنها با اتصال یک منبع تغذیه مشترک به این دو سیم پیچ، موتور شروع به کار می کند. طرح ساختمانی و مدار معادل الکتریکی این نوع موتور در شکل های زیر ترسیم شده است. سیم پیچی تحریک با تعداد دور زیاد برای جریان کم به دور قطب های استاتور پیچیده شده است. سیم پیچی تحریک با سیم پیچی آرمیچر به صورت موازی متصل شده اند.
ویژگی های موتور DC باتحریک شنت
۱ – نباید تحت بار زیاد قرار گیرند.
۲- مزیت استفاده از میدان تحریک شنت، توانایی درایو سرعت متغیر برای ارائه کنترل مستقل آرمیچر و میدان می باشد.
کاربردها
این نوع موتورها نباید در زیر بار سنگین راه اندازی شوند، چون جریان آرمیچر آن بیش از حد زیاد شده و به آن صدمه میزند، بیشترین کاربرد این موتور در بازهای ثابت مانند هواکشهای صنعتی، دمندهها و… است.
۱- دمنده ها
۲- هواکش های صنعتی
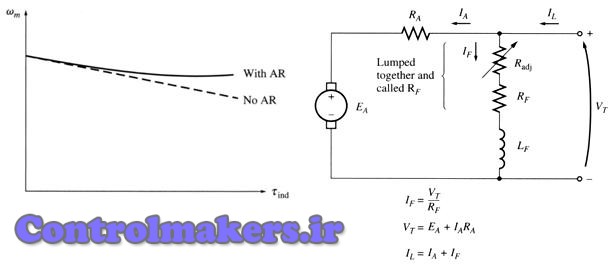
مدار معادل و مشخصه خارجی موتور تحریک مستقل شنت
با توجه به اشکال فوق ملاحظه می شود که مشخصه خارجی موتور تحریک مستقل و موتور خودتحریک شنت کاملا مشابه و یکسان هستند. از این رو در دسته بندی موتورهای DC این دو را در یک دسته قرار می دهند؟ شاخه موازی مدار شنت در خودتحریک شنت به منبع تغذیه متصل است و مانند تحریک مستقل عمل می کند. افت دور کم با افزایش گشتاور بار مشخصه بارز این نوع موتورها است که رفتاری شبیه به موتورهای القایی از خود نشان می دهند.
کنترل سرعت موتور DC شنت
الف- تنظیم مقاومت تحریک و از این طریق کنترل شار میدان ب- تنظیم ولتاژ ترمینال اعمال شده به آرمیچر
الف- تنظیم مقاومت تحریک و از این طریق کنترل شار میدان
۱- افزایش مقاومت میدان RF جریان تحریک را کاهش می دهد (IF = VT/RF) ۲- کاهش جریان جریان تحریک IF شار میدان φ را کاهش می دهد. ۳- کاهش شار، ولتاژ نیروی محرکه داخلی تولید شده را کاهش می دهد. (EA = Kφω) ۴- کاهش EA جریان آرمیچر را افزایش می دهد. (IA = (VT – EA)/RA) ۵- تغییرات در جریان آرمیچر بر تغییر شار غالب است از اینرو ، افزایش IA گشتاور ایجاد شده را افزایش می دهد. ۶- گشتاور ایجاد شده افزایش یافته و در حال حاضر بزرگتر از گشتاور بار است ، بنابراین ، سرعت ω افزایش می یابد. ۷- افزایش سرعت نیروی محرکه داخلی تولید شده ماشین EA را افزایش می دهد. ۸- افزایش EA جریان آرمیچر IA را کاهش می دهد. ۹- کاهش IAگشتاور تولیدی را کاهش داده به نوعی که در یک سرعت بالاتر Tind = Tload شود. تاثیر افزایش دادن مقاومت میدان در حدود یک بار نرمال: از بی باری تا بار کامل افزایش در مقاومت میدان سرعت موتور را افزایش می دهد. مشاهده می شود که شیب منحنی گشتاور- سرعت با افزایش مقاومت تحریک بیشتر می شود. در یک رنج وسیعتر منحنی احتمال دارد بصورت زیر درآید.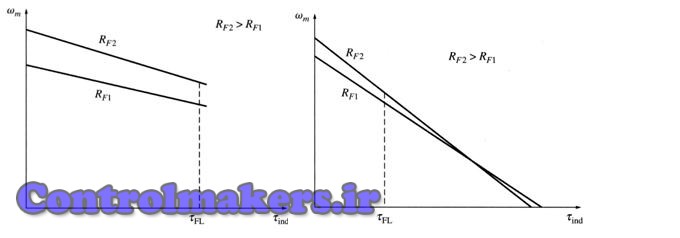
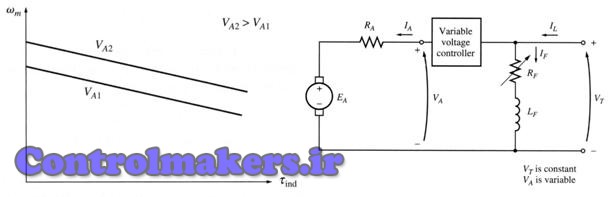
ب- تنظیم ولتاژ ترمینال اعمال شده به آرمیچر
شکل زیر چگونگی کنترل ولتاژ آرمیچر و منحنی های گشتاور سرعت با تغییر ولتاژ برای این روش آورده شده اند. ملاحظه می شود که در این روش شیب خط تغییرات سرعت بر اساس گشتاور بار تغییر نمی کند و فقط به سمت بالا و پایین شیفت پیدا می کند. و از این نظر مطلوب تر از روش قبلی است.