موتورهای AC

موتور AC سه فاز
موتور AC با توجه به قیمت پایین ، استحکام بالا نسبت به سادگی ساخت و هزینه سرویس و نگهداری پایین ، پرکاربردترین موتورهای الکتریکی جهت ساخت سامانه های حرکتی در تجهیزات صنعتی و همچنین خانگی باشند . راه اندازی این موتورها براحتی با اتصال موتور AC به منبع تغذیه AC امکان پذیر است . طراحی و ساخت موتور AC نسبت به موتور DC ساده تر می باشد ولی کنترل سرعت و گشتاور این نوع موتور مستلزم درک عمیقتر در طراحی این نوع موتور است .
ساختار کلی موتور AC
موتور AC مانند بیشتر موتورهای الکتریکی دارای استاتور ( قسمت ثابت بیرونی ) و روتور ( قسمتی که داخل استاتور می چرخد ) می باشد که با فاصله دقیق و حساب شده ای از هم قرار داده شده اند . در حالت کلی برای چرخش موتور AC روتور داخل یک میدان مغناطیسی دوار قرار گیرد که درموتور AC به صورت طبیعی توسط استاتور بدلیل طبیعت منبع تغذیه این میدان مغناطیسی دوار ایجاد می شود درحالیکه در موتورهای DC و همچنین موتورهای AC تک فاز این میدان دوار باید توسط یک وسیله الکتریکی یا مکانیکی ایجاد می گردد .
AC Induction Motor
استاتور
استاتور از چند قطعه کوچک از جنس آلمنیوم یا آهن سبک تشکیل شده است که پس از اتصال این قطعات کوچک شکل آن به صورت یک سیلندر توخالی در می آید و به آن هسته استاتور گفته می شود که با توجه به شکل زیر ( سمت چپ ) در قسمت داخلی این استوانه شیارهایی تعبیه شده شد که از درون آن ها سیم پیچ هایی از سیم روکشدار عبور داده می شود . هر کدام از این سیم پیچ ها به همراه هسته ای که آن را احاطه نموده یک آهنربای مغناطیسی جهت کار با تغذیه AC را تشکیل می دهد . تعداد قطب های یک موتور القایی AC توسط نحوه اتصال اتصال داخلی سیم پیچ های استاتور بستگی دارد . این پیچه ها مستقیما به منبع تغذیه متصل هستند .
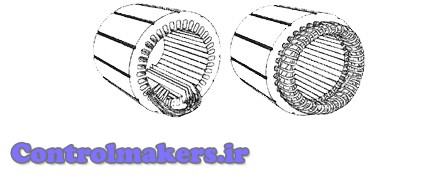
نمای کلی استاتور
روتور
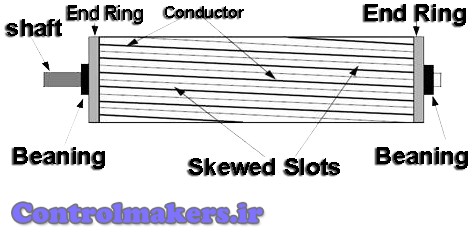
روتور قفس سنجابی
روتور به وسیله مهار هایی در دو انتها روی محور نصب شده ، یک انتهای محور در حالت طبیعی برای انتقال نیرو بلندتر از طرف دیگر گرفته می شود. ممکن است بعضی موتورها محوری فرعی در طرف دیگر ( غیر منتقل کننده نیرو ) برای اتصال دستگاه های حسگر حالت (وضعیت) و سرعت داشته باشند. بین استاتور و روتور شکافی هوایی موجود است. بعلت القا انرژی از استاتور به روتور منتقل می شود. تورک تولید شده به روتور نیرو داده و سپس برای چرخیدن به آن نیرو وارد می کند. صرفنظر از روتور استفاده شده قواعد کلی برای دوران یکی است.
نحوه محاسبه سرعت یک موتور القایی
در روتور میدان مغناطیسی تولید می شود زیرا به طور طبیعی ولتاژ متناوب است و میدان مغناطیسی ای که در استاتور تولید می شود با سرعت سنکرون می چرخد.(Ns)
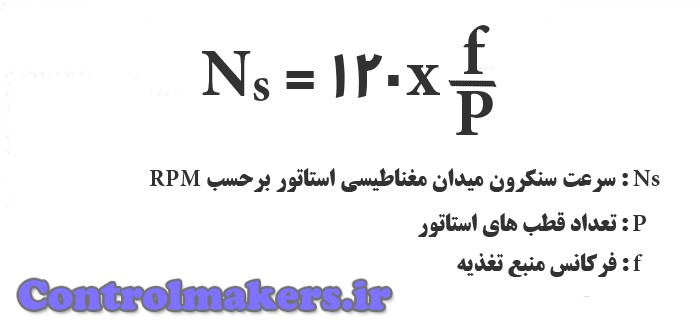
سرعت موتور القایی
تفاوت میان Ns و Nb ، Slip نام دارد. مقدار اسلیپ به مقدار نیروی مکانیکی وارد شده به موتور یا باری که بر روی موتور قرار دارد وابسته است به این صورت که هرچقدر بار وارد شده به موتور افزایش یابد در نتیجه سرعت روتور و یا Nb کاهش می یابد درنتیجه مقدار اسلیپ افزایش پیدا می کند و حالت برعکس هم صادق است .
مقدار Slip ( اسلیپ ) با درصد مشخص می شود و از طریق معادله زیر می توان مقدار آن را برحسب درصد بدست آورد .
فرمول محاسبه اسلیپ برحسب درصد
انواع موتورهای AC
موتور القایی سه فاز
برای آشنایی بیشتر با موتور های AC سه فاز مقالات زیر را مطالعه نمایید .
موتور تک فاز دو خازنی
موتور تک فاز فاز شکسته
موتور تک فاز یونیورسال ( اونیورسال )
موتور سه فاز تبدیل شده
نحوه پلاک خوانی موتورهای AC
معمولا بر روی بدنه موتورهای القایی AC برچسبی مانند تصویر زیر نصب می باشد که برای آشنایی با معانی پارامترهای آن می توانید از جدولی که در ادامه آورده شده کمک بگیرید .

یک نمونه از پلاک نصب شده بر روی موتورهای القایی AC
شرح |
اصطلاح |
|
ولتاژ اسمی پایانه
|
Volts
|
|
جریان تغذیه ظرفیت تکمیل اسمی
|
Amps
|
|
توان موتور برحسب اسب بخار .
|
H.P.
|
|
سرعت اسمی در حالت ظرفیت تکمیل موتور
|
R.P.M
|
|
فرکانس تغذیه مجاز
|
Hretz
|
|
ابعاد فیزیکی خارجی موتور طیق استاندارهای NEMA
|
Frame
|
|
حالت بار موتور, کوتاه مدت, دوره ای, مداوم …
|
Duty
|
|
تاریخ ساخت.
|
Date
|
|
کلاس ایزولاسیونی که برای ساختمان موتور به کار رفته است. این مورد بیشینه حد دمای پیچه موتور را مشخص می کند.
|
Class Insulation
|
|
این مورد مشخص می کند که موتور به کدام کلاس طراحیNEMA متعلق است.
|
NEMA Design
|
|
فاکتوری است که مشخص می کند موتور می تواند چقدر بیشتر از ظرفیت تکمیل اضافه بار داشته باشد.
|
Service Factor
|
|
بازده کاربری موتور در ظرفیت کامل.
|
NEMA Nom
Efficiency
|
|
تعداد فازهای استاتور موتور را مشخص می کند.
|
PH
|
|
تعداد قطب های موتور را مشخص می کند.
|
Pole
|
|
استاندارد ایمنی موتور را نشان میدهد.
|
|
|
مشخص می کندکه پیچه های موتور بصورت Y ( ستاره ) متصل شده اند یا مثلث ( دلتا ).
|
Y
|
|
توان موتور بر حسب وات یا کیلو وات .
|
W
|